
Le mode Waypoint a été juste entraperçu dans un autre post, nous allons ici le détailler avec toutes ses fonctions. Les démonstrations sont faites avec un Phantom 3, l'Inspire offrant d'autres possibilités. Nous allons aussi découvrir les modifications apportées par la dernière version d'Autopilot (v3.3.94).
Comme la dernière version vient juste de sortir, il est possible d'en parler, voici ses possibilités, les vidéos d'explication et des astuces seront rajoutées dès les tournages réalisés. A noter que la fonction WAYPOINT marche également avec le P4.
Le mode waypoint permet de programmer à l'avance un trajet dans lequel le Phantom fera automatiquement certaines actions que ce soit pour le vol ou les mouvements de la caméra, sans que vous ayez à intervenir.
Avant de commencer à dessiner votre mission, il est nécessaire de saisir les données générales qui vont s'appliquer à vos waypoints. Comme dans toutes les fonctions 3 niveaux sont disponibles, avec des réglages de plus en plus détaillés.


- Patrol - La caméra suit le parcours du dessiné un certain nombre de fois (Patrol limit)
- Mark - Le Phantom va voler depuis le départ jusqu'à une marque sur le parcours. En cas de circuit fermé, il prendra la direction du chemin le plus court. La marque peut être déplacée pendant le vol grâce au joystick gauche, vers le haut elle s'éloignera dans le parcours, vers le bas elle se rapproche du point de départ.
- Joystick - Le joystick gauche dirige le Phantom sur le parcours dessiné. Full haut, le Phantom avance, full bas, il recule, les positions intermédiaires gèrent la vitesse

Ensuite la stratégie qui va gérer l'angle de vision de la caméra, pas moins de 7 stratégies différentes vous sont proposées :

- Triggers - Chaque point gachette est lié à un POI spécifique. Le P3 dirige la caméra vers le POI dès qu'il atteint le point gachette. Si le point gachette suivant utilise la même statégie, il est possible d'interpoler le mouvement de la caméra qui va se diriger en cours de vol progressivement du POI initial au POI suivant.
- Subject - Le focus se fait sur un POI sujet positionné à l'écran
- Direction - La caméra sera dirigée vers une direction définie par un angle horizontal et vertical tout au long du parcours
- Joystick - La caméra est dirigée par le joystick de droite, les mouvements verticaux gèrent l'inclinaison verticale, les mouvements horizontaux, la rotation du Phantom.
- Touch - La caméra se dirige vers un point cliqué sur l'écran de l'iPad.
- Device - La caméra est dirigée par les mouvements de votre tablette (ça c'est un peu chaud)
- Passive - La caméra est gérée par les boutons physiques de la RC



Vous pourrez aussi décider du comportement du drone en fin de parcours, soit rester sur place ou revenir au point Home.

En plus de l'altitude et vitesse communes à tous les waypoints, on peut décider si le dernier wp revient automatiquement au premier pour faire ou pas une boucle.

La partie affichant l'altitude et la vitesse communes, permet maintenant d'ajouter une référence qui est soit l'opérateur ou le POI.

En cas de choix sur l'opérateur, le vol se fera en référence avec la RC ou la tablette permettant ainsi de faire un waypoint type follow me. Il faudra alors renseigner dans Offset l'altitude et la distance à ajouter pour faire le suivi.
Le seul réglage supplémentaire concerne le type de parcours, soit en lignes droites soit en courbes automatiquement lissées d'après le parcours dessiné sur l'écran.

Vous pouvez aussi définir le rayon de courbure et la souplesse de la courbe lissée par rapport au dessin initial fait au doigt.

Il est désormais possible s'assigner une action que fera votre Phantom à tel ou tel waypoint, que le parcours soit fait de lignes droites ou de courbes lissées. En cliquant sur un wp un menu apparait et autorise une action. Trois possibilités sont offertes, soit None, dans ce cas il ne fait rien, soit Hover, il se met en sur place pendant une durée que vous définissez, soit Vertical, dans ce dernier cas il se déplace verticalement à une hauteur que vous fixez (vers le haut ou le bas) et à une vitesse que vous donnez.
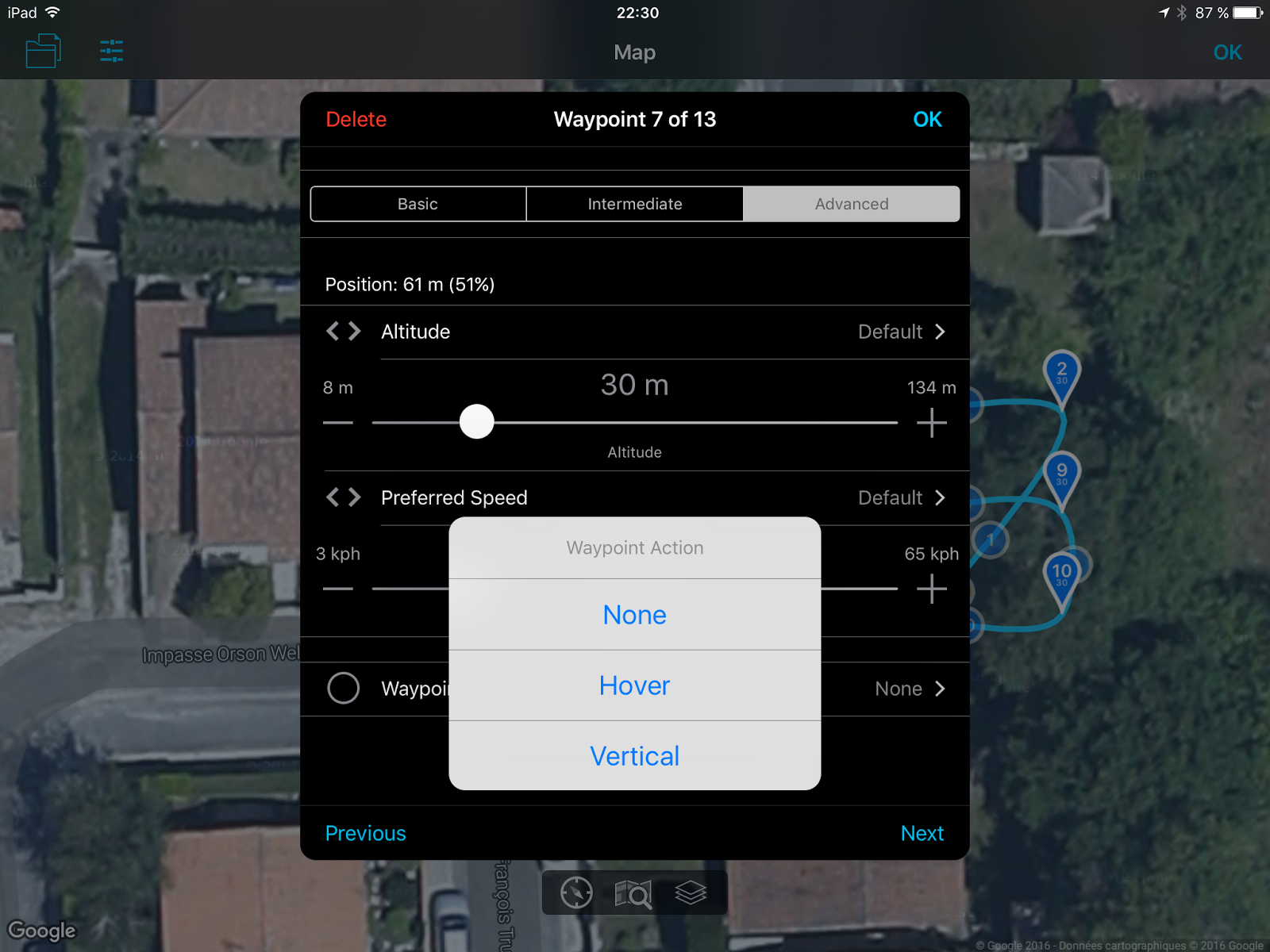
Enfin, autre nouveauté, lorsque vous dessinez un point en utilisant le crayon, un choix vous est proposé, soit Ligne (même chose que dans la version 3.2), soit Grille, il dessine une grille entre le point précédent et celui dessiné, soit Circle, il fait alors un parcours circulaire entre le point précédent et le nouveau.

Vous avez d'ailleurs un aperçu de ce que donne le choix grille dans la partie haute de cette image.
La dernière nouveauté est la compatibilité de ces fonctions avec désormais le P4.
Waypoint sur Autopilot se bonifie au fur et à mesure des mises à jour, si cela parait compliqué de prime abord après avoir lu tout ceci, en fait cette fonction est très facile à appréhender. Waypoint est à utiliser en amont de votre vol, toutes ses options vous permettent de programmer un vol extrêmement précis dans les mouvements ou dans le choix de la prise de vue. A noter aussi que la stratégie choisie peut être modifiée, les wp déplacés, ou les actions réalisées aux wp changées alors que le Phantom réalise sa mission. Tout est modifiable en temps réel.
On sent pointer la photogrammétrie avec cette possibilité de grille et de faire des photos à tous les waypoints, ce sera pour plus tard.

On sent pointer la photogrammétrie avec cette possibilité de grille et de faire des photos à tous les waypoints, ce sera pour plus tard.

La phase de préparation du plan de vol est fortement conseillé avec Autopilot, cela vous permettra d'avoir des vidéos beaucoup plus coulées, le parcours ayant été dessiné au calme en tenant compte des obstacles et du relief. Profitez aussi des nouvelles possibilités pour faire exécuter une action sur un waypoint (par exemple lente ascension près d'une tour). L'existence des stratégies vous permet également de refaire le même parcours mais avec une autre vue du terrain filmé. Gardez comme stratégie finale Joystick ou Touch qui vous permet de diriger la caméra au joystick ou en cliquant sur l'écran pour filmer certains points précis ignorés avec les parcours précédents.
Vous pourrez alors traiter les différentes vidéos du même parcours comme si vous aviez en fait plusieurs caméras. J'utilise actuellement plusieurs logiciels pour le traitement des vidéos, Cyberlink PowerDirector est l'un des plus pratique je trouve pour la gestion multi caméras.
Cette vidéo vous montre comment utiliser les stratégies Triggers, Subjet et Direction avec l'utilisation du Yaw pour cette dernière.
Vous pourrez alors traiter les différentes vidéos du même parcours comme si vous aviez en fait plusieurs caméras. J'utilise actuellement plusieurs logiciels pour le traitement des vidéos, Cyberlink PowerDirector est l'un des plus pratique je trouve pour la gestion multi caméras.

Aucun commentaire:
Enregistrer un commentaire